N20 Gear Motor 3V 300RPM Shaft 10mm with Hall Sensor Encoder (RB0328) Products







| Name | N20 Gear Motor 3V 300RPM Shaft 10mm with Hall Sensor Encoder |
| Code | RB0328 |
| Price | Rs.1,580.00 |
| In Stock | Yes |
| Package | ROBOT |
Product Details
The N20 Gear Motor with Hall Sensor Encoder is a high-precision, low-voltage power solution designed for advanced micro-robotics and IoT devices. This specific 3V 300RPM variant is optimized for systems running on a single Li-ion cell or two AA batteries, providing a brisk rotational speed combined with dual-channel magnetic feedback for precise speed and position tracking.
Specifications
- Rated Voltage: 3V DC (Operating range: 1.5V – 6V).
- No-Load Speed: 300 RPM (at 3V).
- Shaft Type: D-shape (flat side for non-slip mounting).
- Shaft Diameter: 3mm.
- Shaft Length: 10mm.
- Gearbox: Full Metal (Brass and steel).
- Encoder Type: Dual-channel Hall Effect magnetic encoder.
- Encoder Resolution: Typically 7 Pulses Per Revolution (PPR) of the motor shaft.
Features
- Intelligent Feedback: The integrated magnetic encoder allows a microcontroller to monitor the exact position, speed, and direction of the motor, enabling "closed-loop" control.
- Quadrature Output: Provides two pulse signals (Phase A and Phase B). By analysing the lead/lag relationship between these signals, the controller can determine if the motor is spinning clockwise or counter-clockwise.
- Low Voltage Efficiency: Specifically tuned to reach its rated 300 RPM at just 3V, making it ideal for extremely compact, battery-powered gadgets.
- Rugged Construction: Features a precision-cut metal gear train that offers far superior durability and impact resistance compared to plastic gear motors.
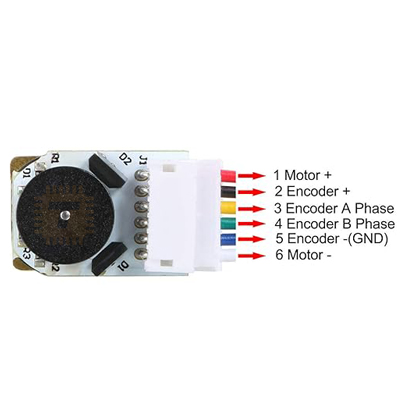
Pin Configuration (6-Pin Connector)
- Motor +: Motor Power (Positive).
- Motor -: Motor Power (Negative).
- Encoder GND: Ground for the Hall sensor.
- Encoder VCC: Power for the Hall sensor (Regulated 3.3V – 5V).
- Signal A (C1): Phase A Output Pulse.
- Signal B (C2): Phase B Output Pulse.
Common Applications
- Precision Micro-Robotics: Small rovers requiring odometry to track distance travelled or pathing.
- Self-Balancing Mini-Bots: Using real-time feedback to maintain stability and adjust motor speed instantly.
- Smart Home Hardware: Automated locks or window blind systems that need to "know" when they have reached the fully open or closed position.
- Surgical & Lab Tools: Powering miniature pumps or stirrers that require constant, monitored RPM regardless of load changes.
Usage Tips
- Clean Power for Sensors: Always power the encoder (VCC/GND) from a stable, regulated logic supply. Connecting the encoder directly to the motor's power source can introduce electrical noise, leading to "ghost" pulses or sensor damage.
- Interrupt Pins: To avoid missing pulses at high speeds, connect Signal A and Signal B to the External Interrupt pins of your microcontroller (e.g., Pins 2 and 3 on an Arduino).
- Resolution Calculation: The final resolution at the output shaft is the encoder PPR multiplied by the gearbox reduction ratio.
- Wiring Care: The 6-pin JST connector is delicate. Ensure the cable is secured with strain relief to prevent the small PCB-mounted pins from breaking during robotic movement.
Sharing is caring, show love and share the product with your friends.
Featured


Add to Cart

Add to Cart

Other Products

Add to Cart



